Positions- und Geschwindigkeitsmessung mit dem GPS-Empfänger 3DM-GX5-45 von LORD
Für ein Entwicklungsprojekt benötigten wir die Geschwindigkeit eines landwirtschaftlichen Fahrzeuges mit mindestens 20 Hz Abtastfrequenz. Dafür gibt es verschiedene Möglichkeiten; es können Radarsensoren oder Encoder (Drehgeber) mit entsprechendem Aufwand ins Fahrzeug integriert werden. Wir haben uns schliesslich für einen GPS-Empfänger (oder GNSS-Empfänger) mit IMU (Inertial Measurement Unit: dreiachsige Kreisel- und Beschleunigungssensoren) und integriertem Kalman-Filter entschieden. Dabei sind wir auf den 3DM-GX5-45 von LORD gestossen, welche alle diese Funktionen beinhaltet.
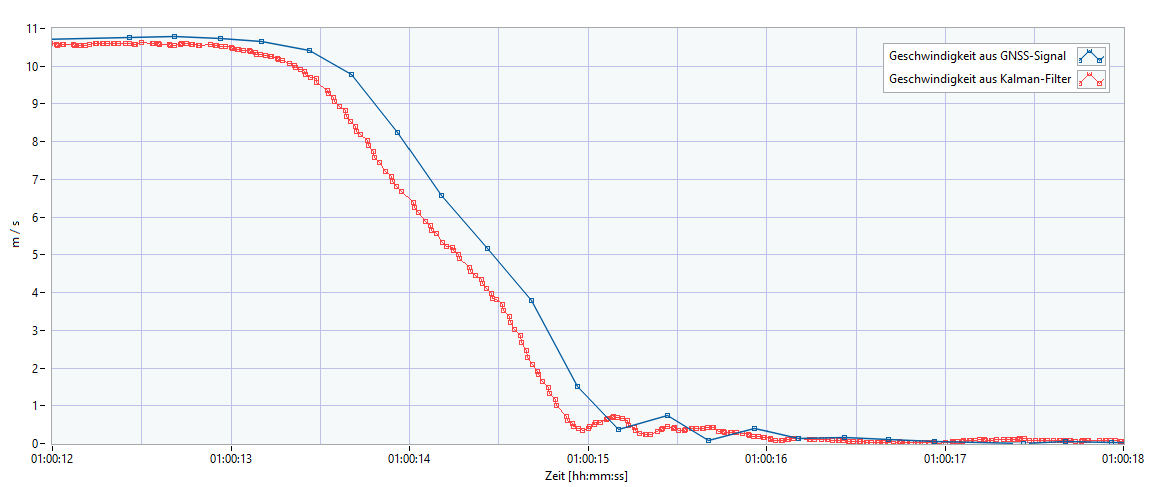
Der eingebaute GNSS-Empfänger aktualisiert mit 4 Hz die Position bzw. den Geschwindigkeitswert. Diese Aktualisierungsfrequenz ist jedoch für die spezielle Messanwendung zu niedrig, um zum Beispiel das Bremsverhalten des Fahrzeuges zu analysieren. Deshalb kommen die in x-, y- und z-Richtung platzierten Beschleunigungs- bzw. Kreiselsensoren zum Zug, die mit 1 kHz abgetastet werden und dem Kalman-Filter neben dem GNSS-Signal zur Verfügung stehen. Der Kalman-Filter ermittelt damit die Position und die Geschwindigkeit des Fahrzeuges, das am Ausgang des 3DM-GX5-45 mit 100 Hz zur Verfügung steht.

Der 3DM-GX5-45 wurde mit Hilfe der SPS-Steuerung PLCnext Control AXC F 3152 von Phoenix Contact in ein Mess- und Auswertungssystem integriert. Das Auswertungstool sämtlicher und zusätzlicher Messwerte wurde mit LabVIEW programmiert. Verschiedene Testfahrten mit Personenfahrzeugen sowie mit einem landwirtschaftlichen Fahrzeug zeigen plausible Geschwindigkeitsdaten, wobei die richtigen Einstellungen des 3DM-GX5-45 sowie eine korrekte Handhabung entscheidend sind.